Simulated forces
There are four forces that predominantly affect drone flight:
- Weight: a downwards force caused by gravity
- Thrust: a propulsive force generated by the propellers
- Drag: a force opposing the drone movement caused by air resistance
- Lift: a mechanical force generated by a solid object moving through a fluid
Weight
In an inertial reference frame, weight is a downward force that is proportional to the drone's mass and the gravitational acceleration. The drone's mass is well known based on the parts selected. Gravitational acceleration is well attested and can safely be considered constant. There are slight variations depending on location, but they do not have a noticeable effect on flight behavior and even so drones generally do not have enough range for these differences to become relevant.
Thrust
Thrust is generated by the rotating propellers of a drone. Propeller blades are shaped like airfoils. While slicing through air, they raise static pressure underneath them, thereby pushing the drone in the opposite direction.
For our Physics 3.0 update, we developed a new thrust model based on a curated database containing tens of thousands of data points from rigorous lab tests. Our model uses part specifications to determine the maximum RPM of a loaded motor, the static thrust at a given RPM, and finally dynamic thrust.
This dynamic thrust is then further adjusted by ground effects. Hovering close above a surface alters airflow, resulting in a higher pressure difference between the top and bottom side of the propellers, increasing available thrust. This effect depends, among others, on the type of surface, the distance to the surface and the pitch of the propellers.

Liftoff's drone state calculation pipeline
This approach insures a high degree of accuracy regardless of what parts a drone might be using.
Drag
Our Physics 4.0 update focused mainly on drag calculations. Drag, sometimes also called air resistance, is a force that counteracts the movement of the drone. The strength of drag depends on many factors, the foremost being the surface area of the drone, as projected onto its velocity.
Projected area
One way to visualize the drone's surface area is to imagine a camera looking back towards the drone from a little further along its current trajectory. The silhouette of the drone as seen from this perspective is the projected area. While that silhouette is easy to picture when flying straight forward, it's much harder to imagine when the drone is performing freestyle tricks or rounding tight corners during races.
On the following illustration, the projected area as approximated before Physics 4.0 is shown in gray, whereas the more accurate projection from Physics 4.0 is shown in black.
|
|
|
| Projected area when free-falling horizontally, propellers not rotating |
Projected area when the drone's velocity points sideways (relative to the drone itself) |
Efficient estimation method
As a first approach to calculate the drone's projected area, we tried implementing a camera that continuously filmed the drone. This gave perfectly accurate data, but had a significant performance overhead. Instead, we settled on an approach where 42 different angles were pre-computed before flying, which the simulation can then interpolate between at runtime. In this way, we consistently obtain an accuracy of over 98%, with no performance impact.
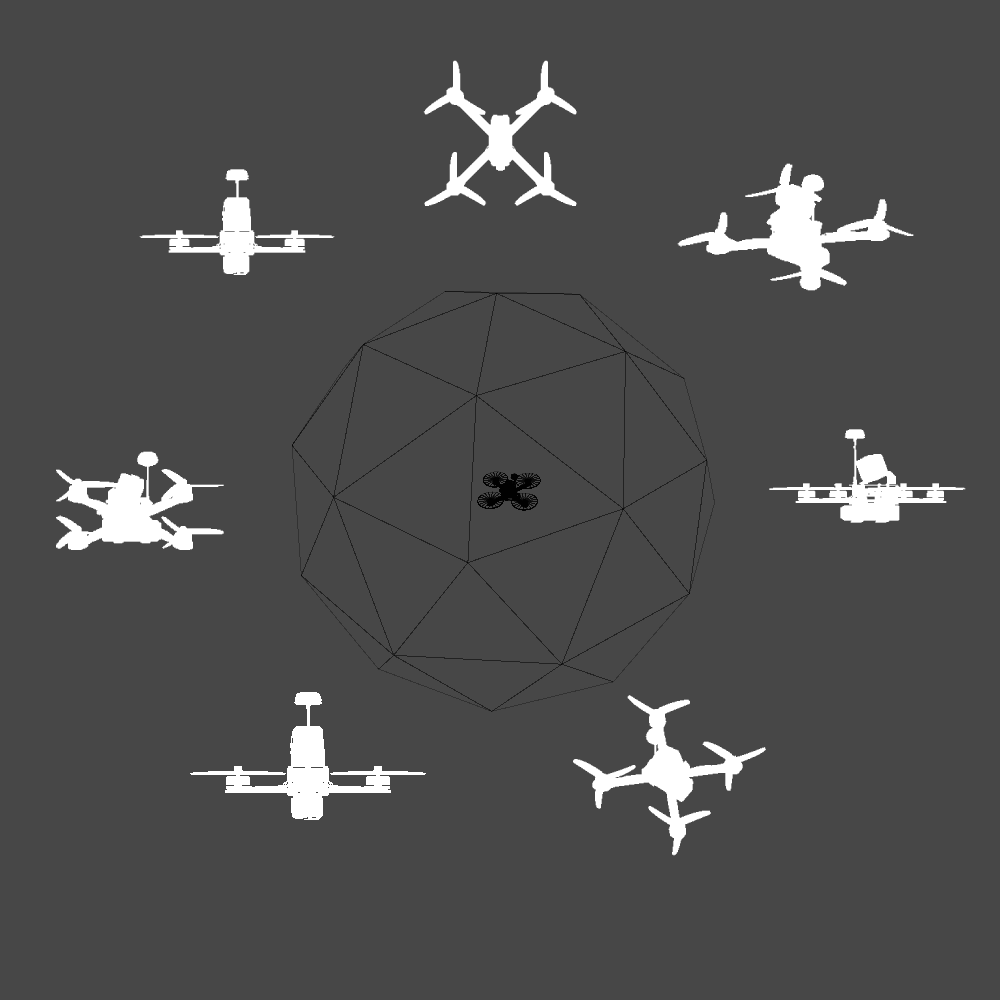
Projected area sampling process: each point on the icosphere is a sampled angle
Lift
Lift is a mechanical force generated by a solid object moving through a fluid. An exhaustive physical model of lift is quite complex and still subject to discussion today. In general terms, however, lift is influenced by the fluid's properties (density, viscosity and compressibility), the surface area of the solid object, its shape and velocity, and its angle relative to the fluid flow. Lift is perpendicular to the flow and thereby also to drag.
Lift is caused by a pressure difference and a change in flow velocity. Imagine an airfoil (the typical "wing" shape) flying forward and tilted slightly backward. On the bottom side of that airfoil, the air velocity will be lower and pressure higher, while the opposite holds for the top side. This creates a vertical upward force on the airfoil.

Visualization of the air pressure around a moving airfoil (green: low pressure, red: high pressure)
Although most drones are not specifically airfoil-shaped, they still generate lift in a similar manner. Consider a drone flying in straight line while pitched forward. Given the drone's orientation, this time the high pressure zone is above and the low pressure is below. In this case, lift actually points downwards!

Thrust, drag and lift direction in the case of a drone flying in straight line (force scale is not representative)